18 January, 2024
0 Comments
3 categories
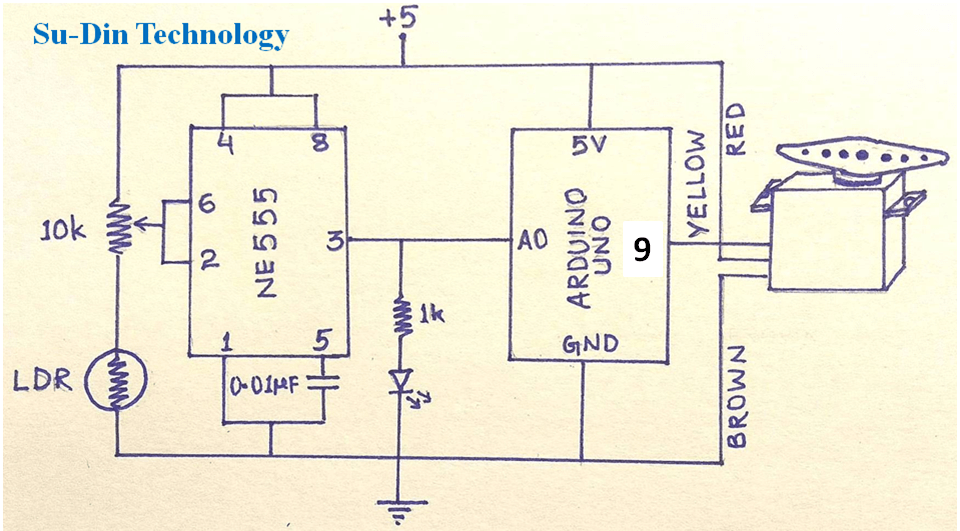
ସର୍କିଟ ଡାଇଗ୍ରାମ
ମାଇକ୍ରୋକଣ୍ଟ୍ରୋଲର କୋଡ୍
//Su-Din Technology "Parabolic reflector tracking"
//CONTROL SIGNAL WIRE OF SERVO MUST BE ATTACHED TO A PWM PIN OF ARDUINO
#include<Servo.h>
Servo s1;
int readPin=A0;
int readVal;
float V=0;
int i;
void setup() {
pinMode(readPin,INPUT);
Serial.begin(9600);
s1.attach(9);//Control wire of servo to PWM pin 9
s1.write(i=0); /*when project is initially powered,
servo angle=0, to set it towards EAST.THIS IS A RESET OF
PROJECT*/
}
void loop()
{
readVal=analogRead(readPin);/*We have to read the analog voltage value at pin A0 which is developed at pin 3 of 555 ic when light falls on LDR*/
V=(5./1023.)*readVal;
Serial.print(V);
Serial.println("volts");
delay(500);
if(V>3.0){
for(i=0; i<=15; i+=1){
s1.write(i);
delay(100);/*These 100 has a meaning,if you write 5000 ,you will notice nothing*/
s1.write(15); }
delay(3000);
for(i=16; i<=30; i+=1){
s1.write(i);
delay(100);
s1.write(30); }
delay(3000);
for(i=31; i<=45; i+=1){
s1.write(i);
delay(100);
s1.write(45); }
delay(3000);
for(i=46; i<=60; i+=1){
s1.write(i);
delay(100);
s1.write(60); }
delay(3000);
for(i=61; i<=75; i+=1){
s1.write(i);
delay(100);
s1.write(75); }
delay(3000);
for(i=76; i<=90; i+=1){
s1.write(i);
delay(100);
s1.write(90); }
delay(3000);
for(i=91; i<=105; i+=1){
s1.write(i);
delay(100);
s1.write(105); }
delay(3000);
for(i=106; i<=120; i+=1){
s1.write(i);
delay(100);
s1.write(120); }
delay(3000);
for(i=121; i<=135; i+=1){
s1.write(i);
delay(100);
s1.write(135); }
delay(3000);
for(i=136; i<=150; i+=1){
s1.write(i);
delay(100);
s1.write(150); }
delay(3000);
for(i=151; i<=165; i+=1){
s1.write(i);
delay(100);
s1.write(165); }
delay(3000);
for(i=166; i<=179; i+=1){
s1.write(i);
delay(100);
s1.write(179); }
delay(3000);
}
if(i==180){ /*This loop is to send back the shaft of servo again towards EAST after it has reached WEST*/
for(i=180; i>=0; i-=1){
s1.write(i);
delay(100);
}
delay(4000);
}
}
Designer:
Er. Anil Kumar Prusty
Phone No. :- 9861004895
Tags: parabolic mirror solar cookerparabolic reflector parabolic reflector solar cooker parabolic reflector solar hot water heater parabolic reflector solar oven parabolic reflector thermal power plant sun tracking of parabolic reflector
Related Posts


କୁଲିଂ ହ୍ୟାଟ୍
ସର୍କିଟ୍ ଡାଇଗ୍ରାମ୍ ମୋଟର ବେଗ ନିୟନ୍ତ୍ରଣ ସର୍କିଟ୍ ଡାଇଗ୍ରାମ୍ Designer:Er. Anil Kumar…

ଅଟୋମେଟିକ୍ ଡ୍ରେନ୍ ବ୍ଲକେଜ୍ ରିମୁଭର୍
ସର୍କିଟ ଡାଇଗ୍ରାମ: Designer:Er. Anil Kumar PrustyPhone No./ Whatsapp :- +91…